ARTIFICIAL INTELLIGENCE
Surgical World Models in Robotic Surgery: A Review
M Boels, H Robertshaw, T C Booth, A Granados, P Dasgupta and S Ourselin
Submitted to IEEE T-MRB
Postdoctoral Researcher, University of Cambridge

Maxence is a postdoctoral research associate in the Prorok Lab at the University of Cambridge's Department of Computer Science and Technology, working with Prof Amanda Prorok. His research focuses on enabling swarms of drones to navigate rapidly through complex, constrained environments such as narrow doorways and tight passages. Drawing from his background in surgical video understanding and robotics, he develops vision-based perception and control algorithms that allow multi-agent systems to coordinate in real-time while avoiding collisions. Previously, he completed his PhD at King's College London (2021–2025) on surgical workflow prediction in robotic surgery, supervised by Prof. Sebastien Ourselin.
Vision-based perception and control algorithms for drone swarms navigating constrained environments — narrow doorways and tight passages — with real-time multi-agent coordination and collision avoidance.
M Boels, H Robertshaw, T C Booth, A Granados, P Dasgupta and S Ourselin
Submitted to IEEE T-MRB
M Boels, Y Liu, P Dasgupta, A Granados, and S Ourselin
IJCARS 2024

UAV DETECTION - AUTONOMOUS SYSTEMS
Vision-based multi-UAV swarm for monitoring critical infrastructures
ROBOTICS - DRONES
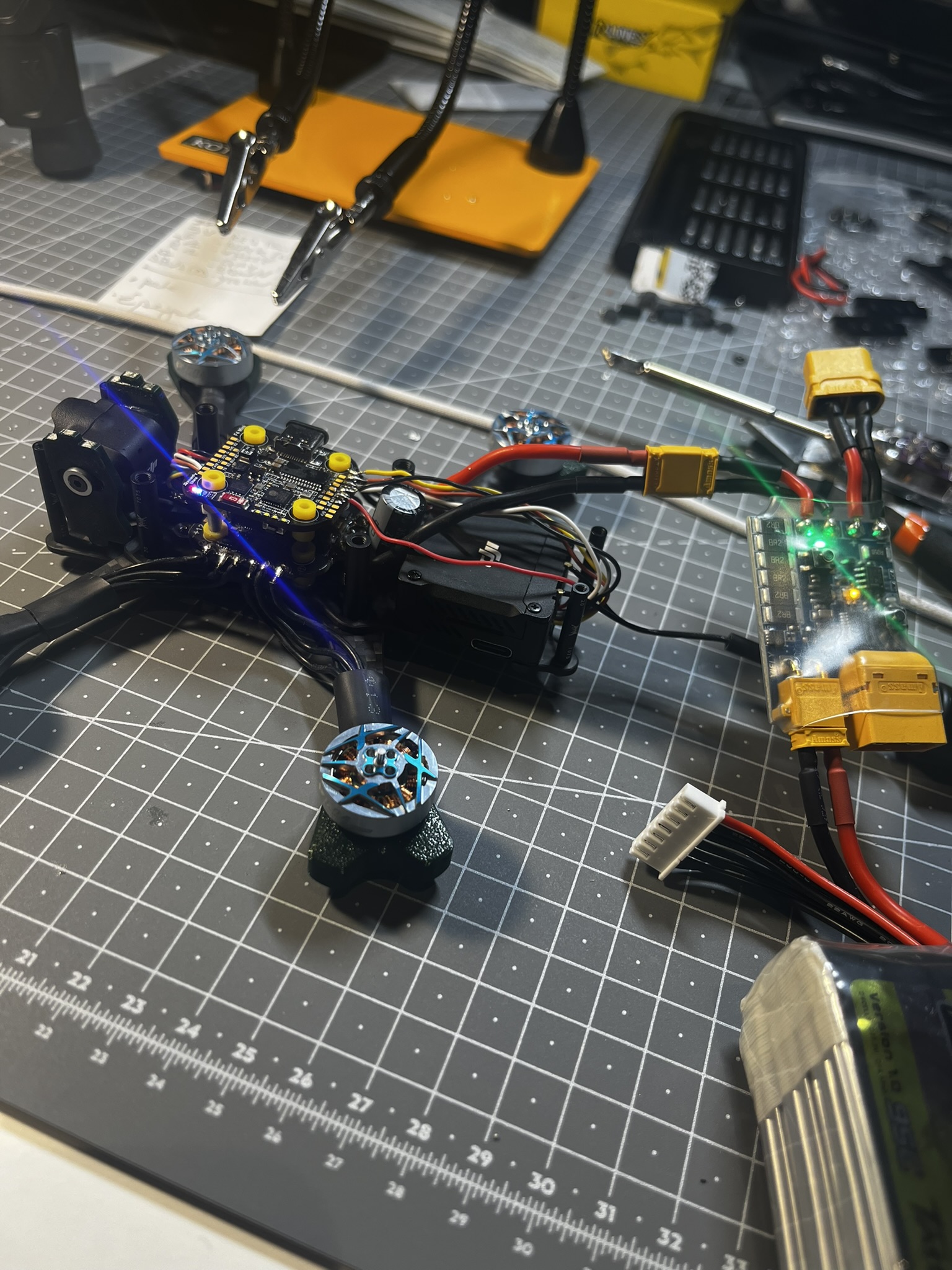
Building and flying a custom FPV drone from scratch
ROBOTICS - SIM2REAL
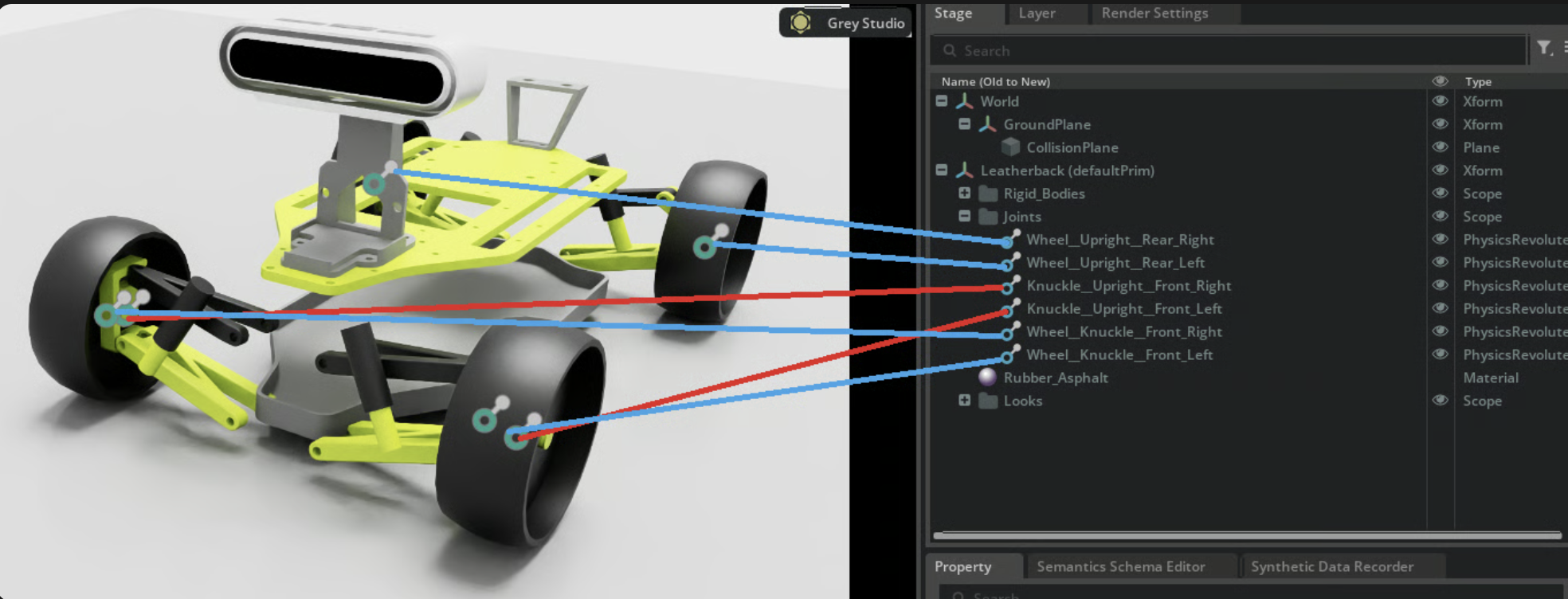
Autonomous RC car via sim-to-real RL in IsaacLab
_screenshot_23.09.2025.png)
ROBOTICS - MANIPULATION
Autonomous Surgical Manipulation Robot
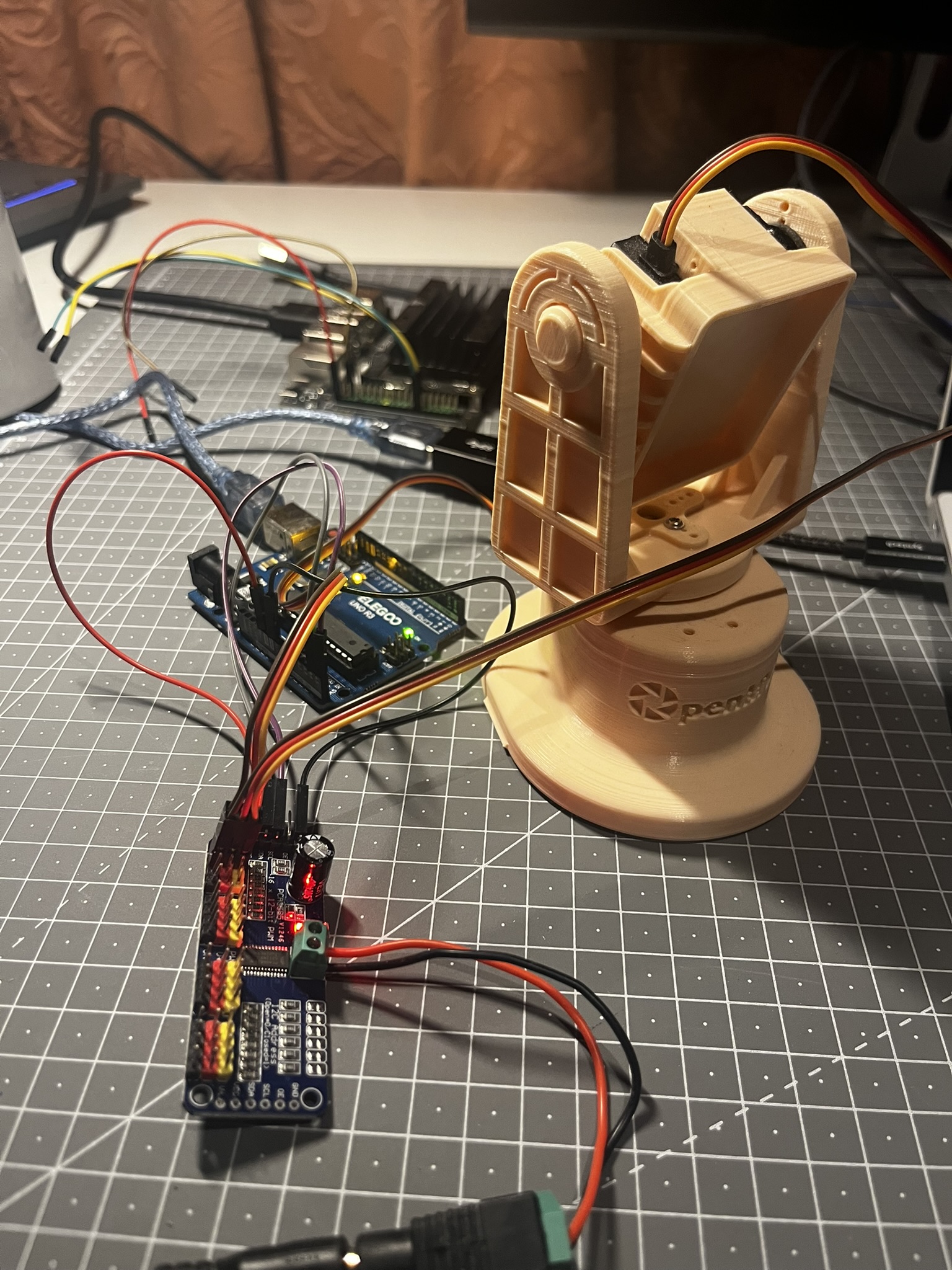
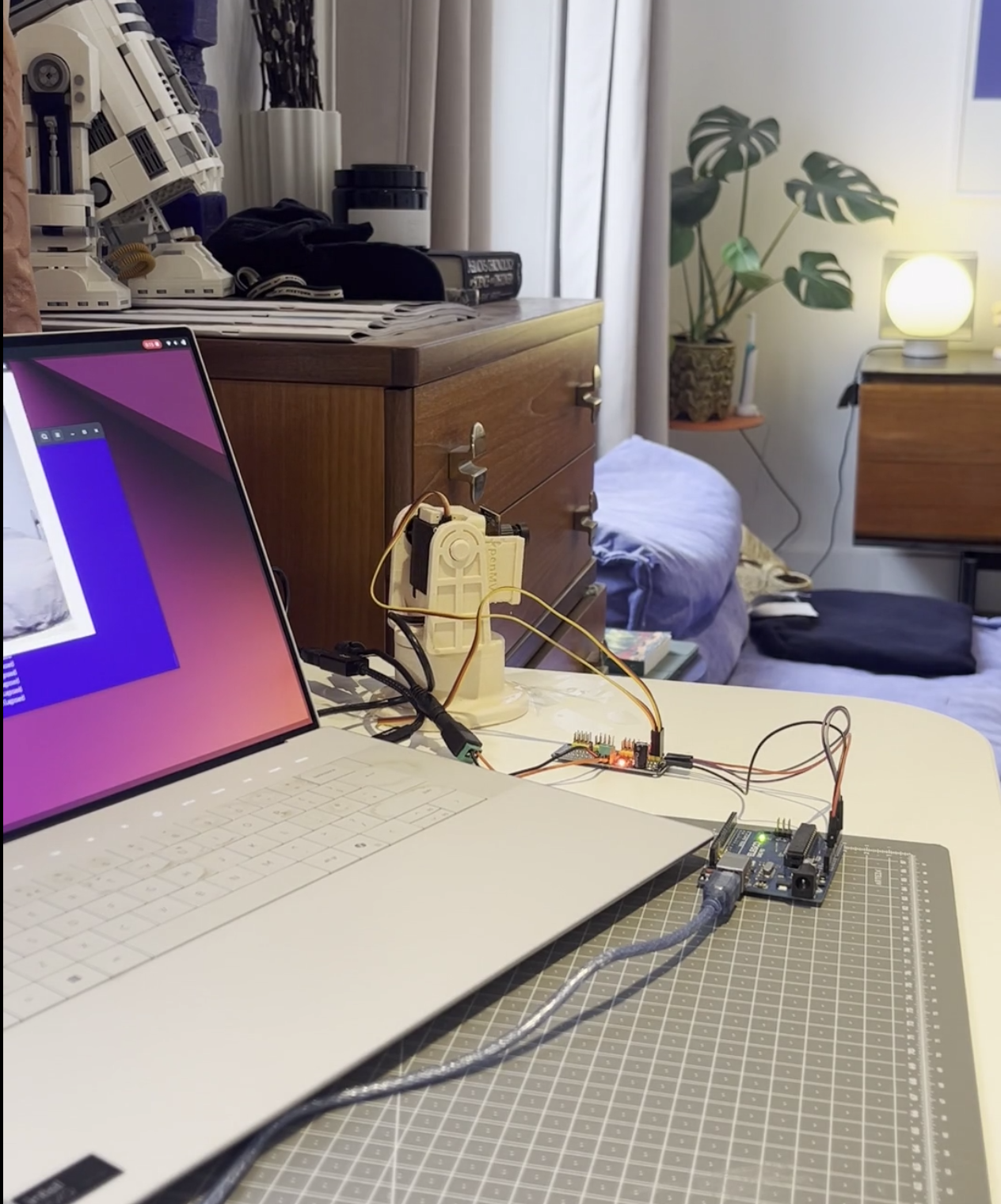
ROBOTICS - TRACKING
Pan-Tilt Camera and Laser Turret