Pan-Tilt Tracking Camera
Project Overview
A computer vision system for tracking people using a USB camera and controlling a pan-tilt servo mechanism with YOLOv8-based object detection.
Key Features
- YOLO Person Detection: Uses YOLOv8 for robust and fast person detection
- Real-time Tracking: Smooth tracking with Kalman filtering and position smoothing
- Pan-Tilt Control: Arduino-based servo control with inverted pan servo support
- Tracking Modes: Surveillance mode (keeps person in scene) and Turret mode (precise targeting)
- Motion Compensation: Prevents feedback loops for stable tracking
Project Progress
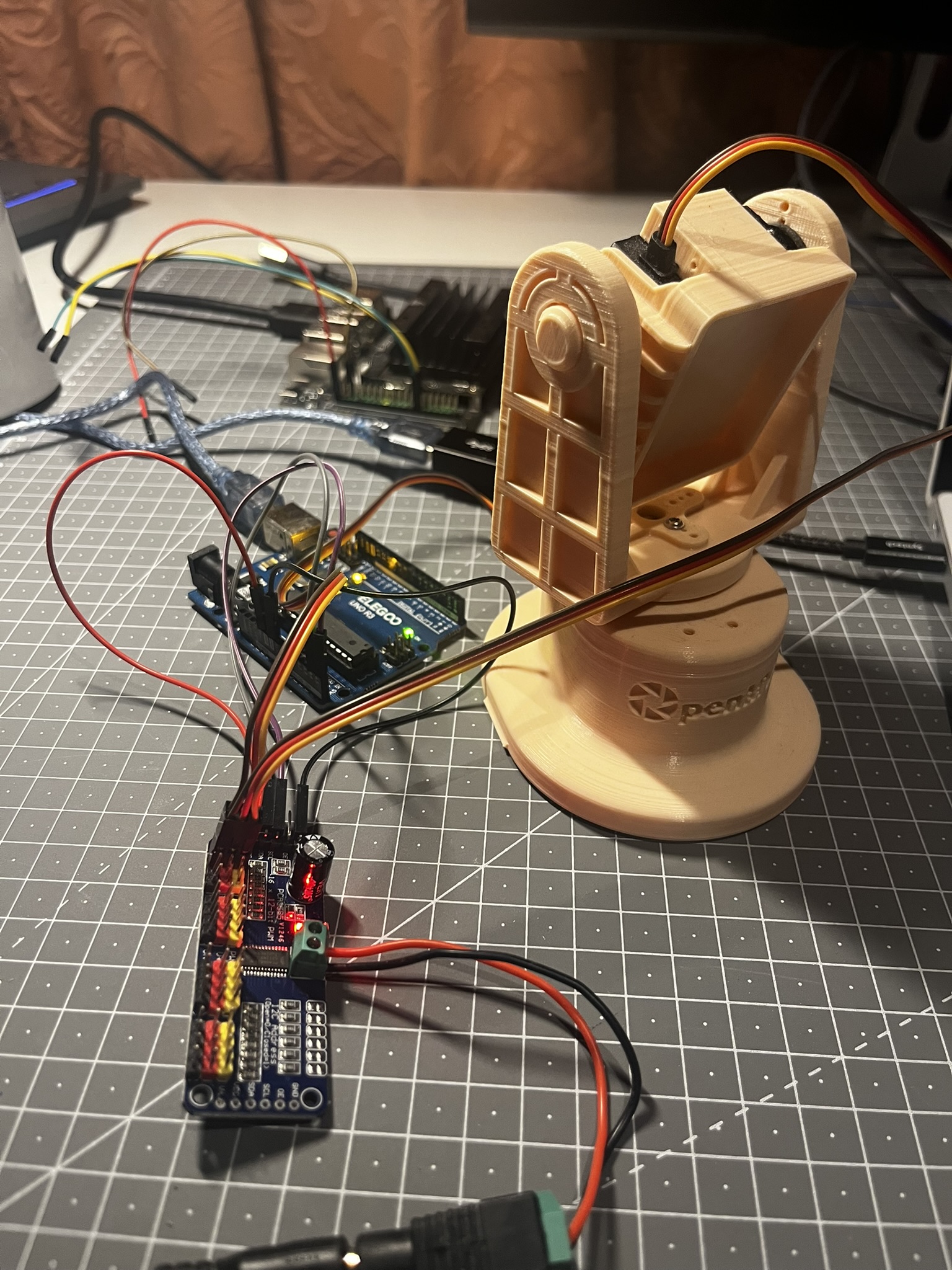
Hardware assembly in progress and electronics integration
Initial testing of the pan & tilt turret mechanism with servos
Pan-tilt camera turret with improved stability and control
Screen recording of the turret's camera feed during operation
Technical Details
Hardware Components
- Camera: USB 2.0 UVC camera (U20CAM-1080P-1)
- Servos: 2x MG996R servos for pan and tilt movement
- Servo Controller: PCA9685 16-channel servo controller board
- Arduino: Arduino compatible microcontroller (tested with Arduino Uno/Nano)
- Computer: Linux system (tested on Ubuntu and NVIDIA Jetson Nano)
Tracking Modes
- Surveillance Mode: Keeps the person in the scene with stable movements using longer history buffer for smooth tracking
- Turret Mode: Precision targeting at the center of detected bounding box with more immediate response
Advanced Features
- Kalman Filtering: Predicts target positions, maintains tracking during occlusions, reduces jitter
- Motion Compensation: Prevents feedback loops, distinguishes between real and apparent motion
- Performance Logging: Comprehensive evaluation tools to analyze tracking results